AMB3R: Accurate Feed-forward Metric-scale 3D Reconstruction with Backend
CVPR, 2026 (Highlight)
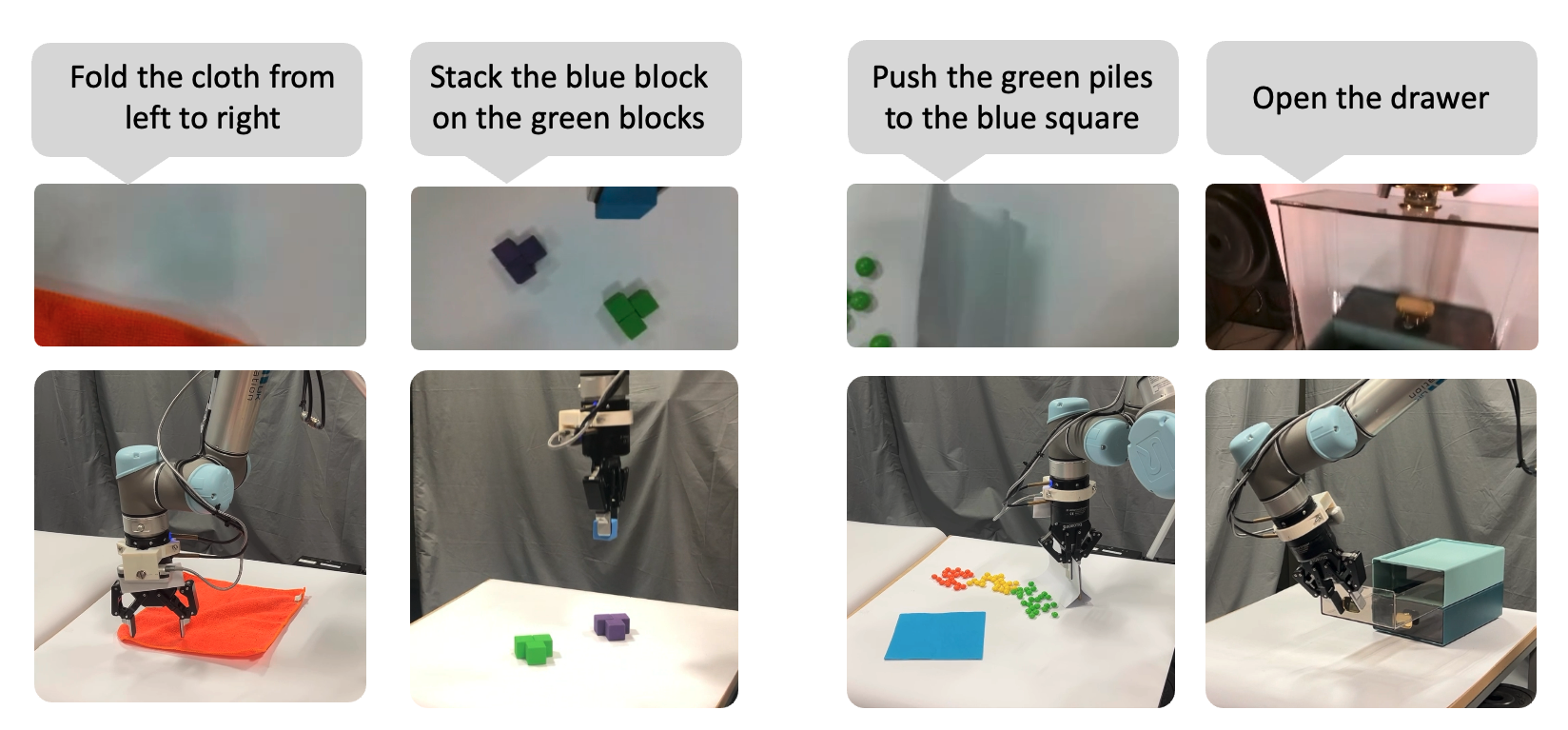
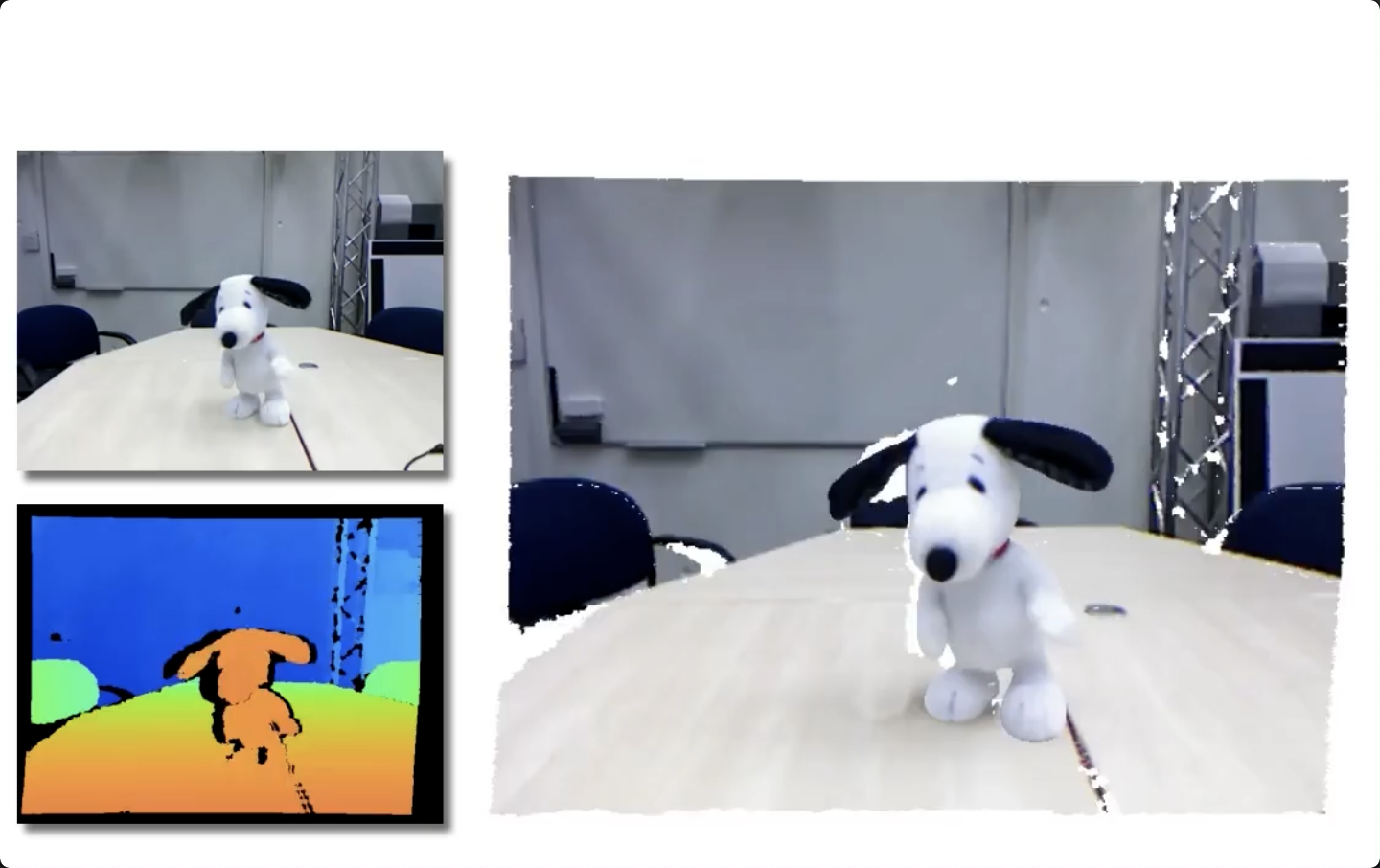
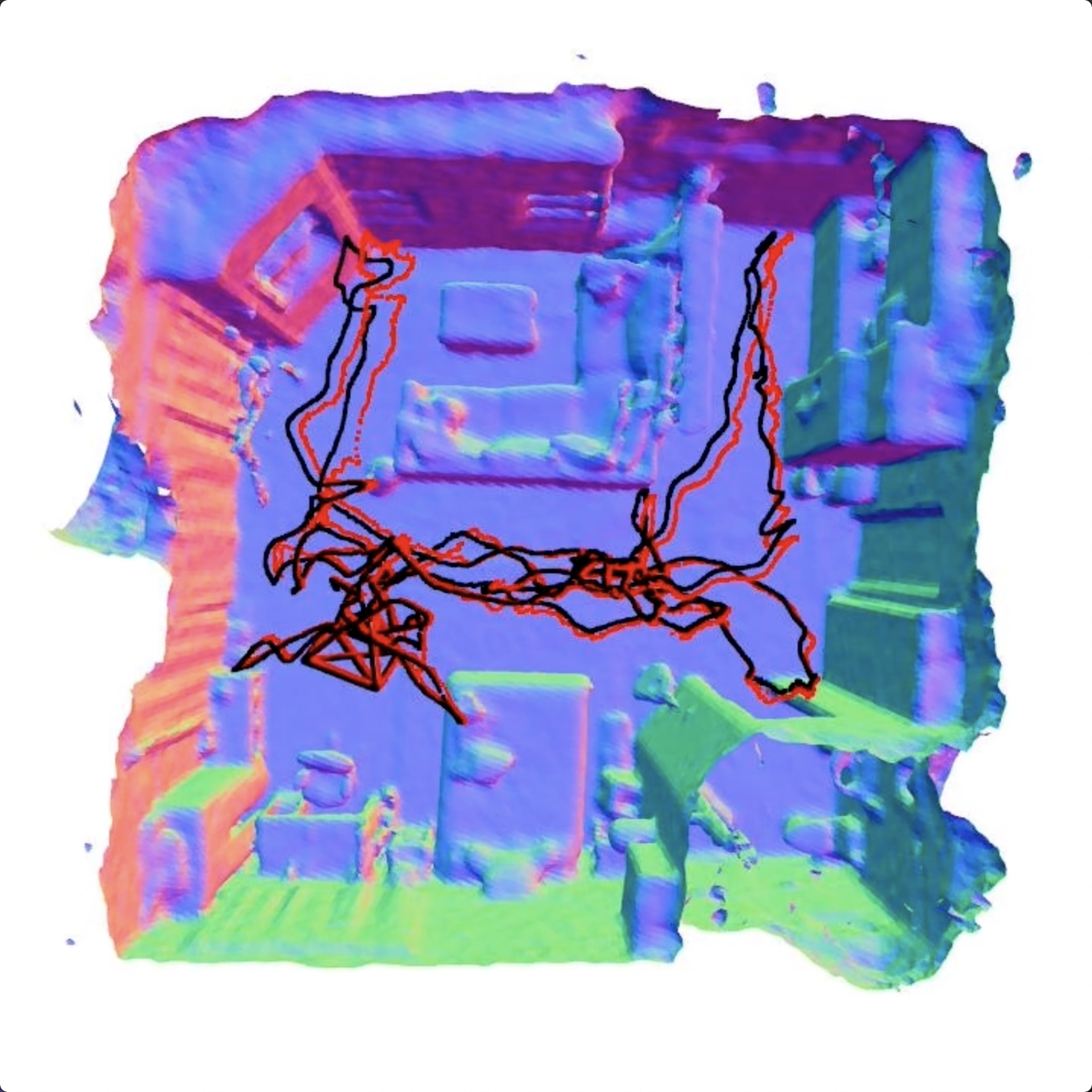
AMB3R is a multi-view feed-forward model for metric-scale dense 3D reconstruction that addresses diverse 3D vision tasks. We also introduce AMB3R-VO and AMB3R-SfM: two training-free, model-agnostic pipelines that extend multi-view transformer for VO and SfM of any number of images without test-time optimisation.